
یک نانوکوادکوپتر از چه اجزایی تشکیل شده است؟
یک نانوکوادکوپتر از چه اجزایی تشکیل شده است؟

امروزه کوادکوپترها بیش از هر زمان دیگری از نظر ارزانی قیمت و محبوبیت نزد مردم وجود دارند . قیمت کوادکوپترها از ۱۰ دلار تا هزار دلار بالا میرود. اما ما در اینجا میخواهیم نگاهی به ساختار و چگونگی یک نانوکوادکوپتر بیاندازیم. نانوکوادکوپترهایی که روی دست ما جا میشوند.
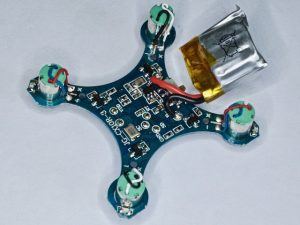
بسیاری از نانوکوادکوپترها دارای GPS، دوربین ، فشار سنج هستند اما ما میخواهیم ساختار یک نانوکوادکوپتر ساده و پایهای را بررسی کنیم که برای استفاده در محیطهای داخلی طراحی شده است. نام این نانوکواد Cheerson CX-10 است که قیمت آن در حدود ۱۴ دلار است.

جهت باز کردن آن باید چهار پیچ پشت آن را باز کرد.

در این قسمت ، بخشهای متفاوت نانوکوادکوپتر را مختصرا توضیح میدهیم:
برد الکترونیکی نانوکوادکوپتر :

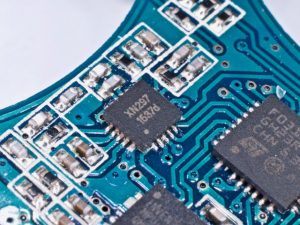
با باز کردن پیچها دیده میشود که در ساخت این برد از یک PCB دو لایه استفاده شده و قطعات الکترونیکی سطحی بر روی هر دو طرف آن نصب شدهاند. سیمهای هر چهار موتور DC و باتری لیتیومی آن احتمالا با دست لحیم شدهاند.
میکروکنترلر:

پردازنده به کار برده شده در این نانوکواد، میکرو STM32F031K4 است. که دارای ویژگیهایی همچون cpu cortex M0، ۳۲ پایه و ابعاد ۵*۵mm است. حداکثر سرعت کلاک این میکرو ۴۸ مگاهرتز است. حافظهء قابل برنامه ریزی این میکرو ۳۲kB میباشد و از انواع مختلفی از پروتکلهای ارتباطی همچون I2C ، SPI ، UART حمایت میکند.
رادیو (قسمت فرستنده/گیرنده):
فرستنده/گیرنده ۲٫۴GHz
جهت دریافت داده ها از رادیو کنترل دستی باید از یک گیرنده استفاده کرد. نام فرستنده/گیرنده ۲٫۴GHz ، XN297 است. ارتباط فرستنده و گیرنده از طریق باس SPI صورت میگیرد. XN297مشابه آی سی فرستنده/گیرنده مشهور NRF24L01 است. در طرف دیگر برد، آنتن گیرنده موجود میباشد.

آنتن گیرنده
سنسورها:

ژایروسکوپ و شتاب سنج
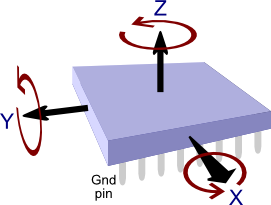
برای اطمینان از صحت پایداری و پرواز راحت نانوکواد از شتابسنجها و ژایروسکوپها استفاده میشود. این کوادکوپتر از سنسور mpu6052 که دارای سه محور شتابسنج و سه محور ژایروسکوپ در یک تراشه است بهره میگیرد. ارتباط بین سنسور mpu6052 و میکرو STM از طریق پروتکل I2C صورت میگیرد.
از شتاب سنج ها برای محاسبه شتاب زاویهای در هر سه محور x,y,z و از ژایرو ها جهت محاسبه سرعت دورانی حول هر محور استفاده میکنند.
با استفاده از خروجی سه محور شتاب سنج طبق یک رابطهء ریاضی میتوان زاویه نانوکواد را با هر سه محور مختصات مرجع پیدا کرد.
باتری:

باتری لیتیومی
جهت تامین انرژی این نانوکواد برای اینکه دقایق محدودی پرواز کند(پنج دقیقه در هر بار شارژ) ، باید از یک باتری لیتیومی تک هستهای استفاده کنیم. این باتری دارای ولتاژ نامی ۳٫۷ ولت و جریان دهی ۱۰۰mAh است، یعنی در هر ساعت ۰٫۳۷ وات انرژی ذخیره شده را آزاد میکند. ابعاد باتری ۱۷mm x 17mm x 7mm است.
علاوه بر این، این باتری شامل یک مدار حفاظت کوچک برای جلوگیری از تخلیه بیش از حد است. جهت تامین یک ولتاژ پایدار از یک رگولاتور با افت کم به شماره LN1134، ساخت شرکت Shanghai Natlinear استفاده شده است. خروجی این رگولاتور سطح ولتاژ ۳ ولتی با ۳۰۰mA جریان دارد.

رگولاتور سه ولتی
قیمت این نانوکواد در حدود ۱۴ دلار است. حتی اگر قیمت تک تک قطعات به کار برده شده در این برد را جمع بزنیم باز هم از قیمت کلی آن بیشتر میشود که نشان از این دارد که این محصول در تعداد بالا مثلا حدود ۱۰ تا ۱۰۰ هزار سفارش ساخت داشته که اینقدر قیمت پایینی دارد.
در همین چند سال پیش هلیکوپتر کوچک و ساده RC که مشابه همین نانوکواد بود ، با قیمت ۳۵ دلار به فروش میرسید. که این موضوع جالب نشان از ارزان شدن اسباب بازیهای الکترونیکی در آینده دارد.


 (2 نظر, امتیاز کل: 3,50 از 5)
(2 نظر, امتیاز کل: 3,50 از 5)


{kind=link}
{kind=link}
{kind=link}